
Resume
4 Years of Work Experience, 7 Years of Academic Experience
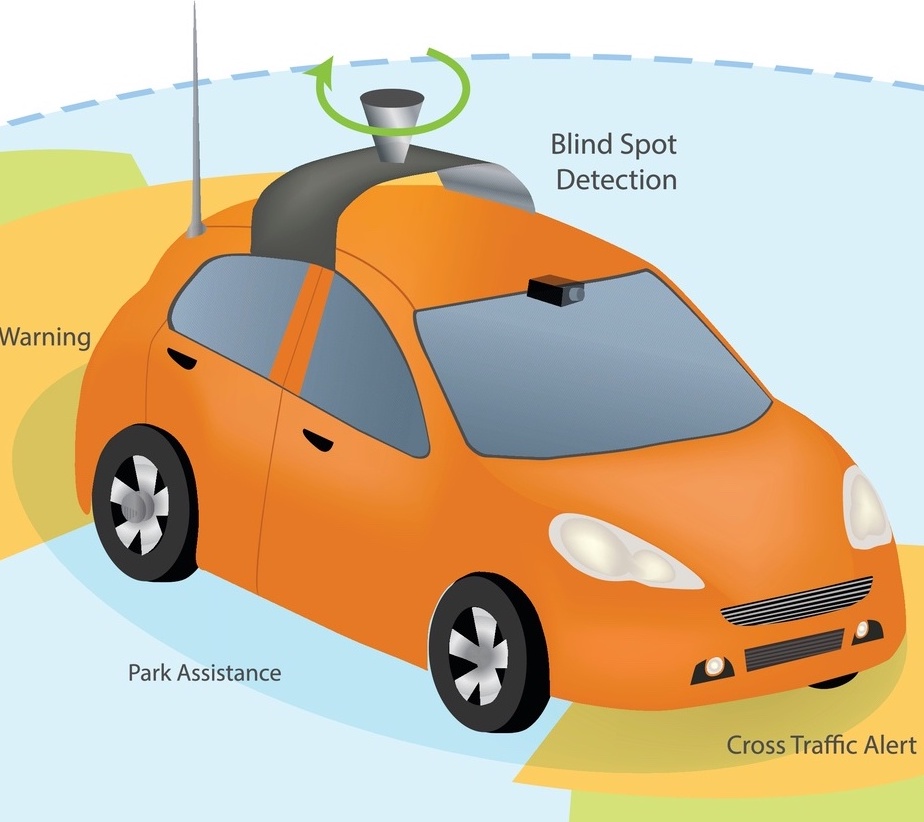
Self-driving Car
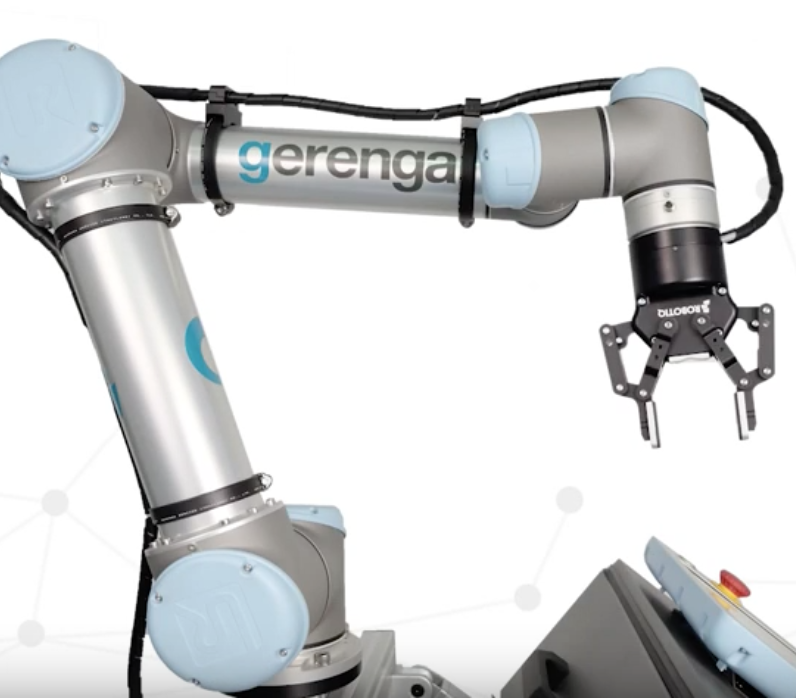
Piece-picking Robot

Quadcopter
Coding
Work Experience
2021-Present
AlgoluxSenior Research Engineer
Decision-making for autonomous driving vehicles
-- Behavior planning (50%)
-- Trajectory planning (25%)
2020 - 2021
RoboEye.aiRobotics Software Engineer
Piece-picking robot arm (Universal Robot 5, 6-DoF) with a gripper as the end-effector
-- Trajectory planning
2019 - 2020
Noah's Ark Lab | Huawei TechnologiesResearcher
Autonomous Driving @ Noah's Ark Lab (The AI research center of HUAWEI)
-- Behavior planning (40%)
-- Motion Planning (50%)
-- Motion Prediction of pedestrians(10%)
Education
2021 - Current
Udacity
Machine Learning Engineer (Nano-degree)
-- Machine Learning in Production
-- Machine Learning Case Studies.
2016 - 2019
McMaster University
Research Assistant ( as a Ph.D candidate)
-- Distributive control of quadcopters to cooperatively transportation of a cable-suspended payload
-- Parameter identification using supervised learning, state estimation, and trajectory planning
Most Proud of
- Winning the second prize in the National Math Competition.
- Winning the National Scholarship of China.
- Paying off the debts for my family.
Coding Skills
C++/C
80%
Python
80%
Matlab
80%
Software Dev. Tools
- ROS
- Git
- Docker
- Amazon SageMaker
- TensorFlow
Peer Paper Review
- Conference on Robot Learning (CoRL 2020)
- IET Control Theory and Applications
- Industrial Robot | Emerald Insight